全国服务咨询热线:
13636367477
13636367477

电动执行器和气动执行器一样,是控制系统中的一个重要部分。它接收来自控制器的4一20mA或0一10mA直流电流信号,并将其转换成相应的角位移或直行程位移,去操纵阀门、挡板等控制机构,以实现自动控制。电动执行器有直行程、角行程和多转式等类型。角行程电动执行机构以电动机为动力元件,将输入的直流电流信号转换为相应的角位移(0度一90度),这种执行机构适用于操纵蝶阀、挡板之类的旋转式控制阀。直行程执行机构接收输入的直流电流信号后使电动机转动,然后经减速器减速并转换为直线位移输出,去操纵单座、双座、三通等各种控制阀和其它直线式控制机构。多转式电动执行机构主要用来开启和关闭闸阀、截止阀等多转式阀门,由于它的电机功率比较大,最大的有几十千瓦,一般多用于就地操纵和遥控。这三种类型的执行机构都是以两相交流电动机为动力的位置伺服机构,三者电气原理*相同,只是减速器不一样。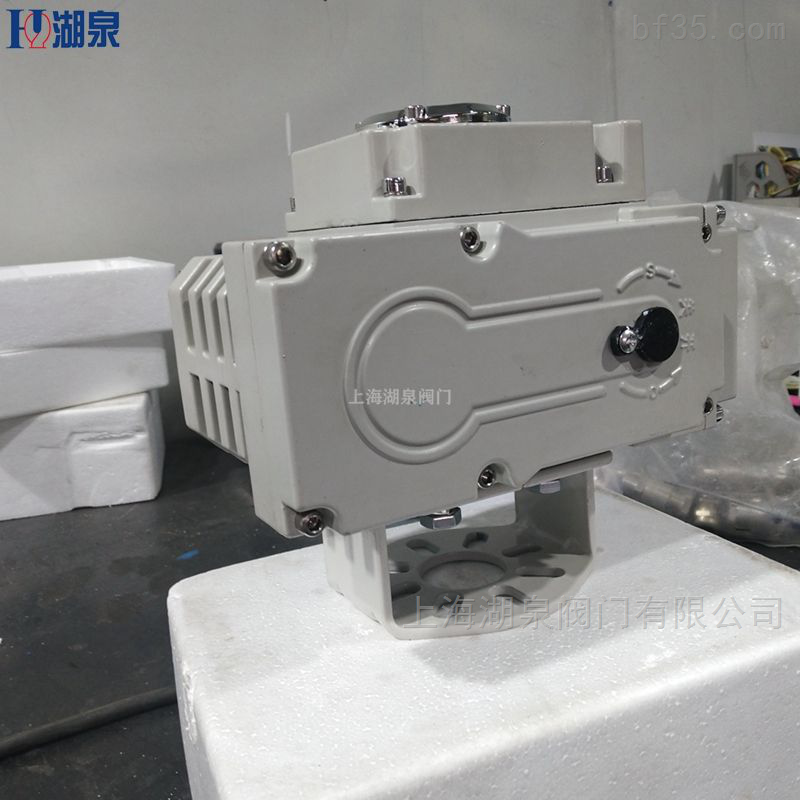
角行程电动执行机构主要性能指标:三端隔离输入通道,输入信号4一20mA(DC),输入电阻250欧姆;输出力矩:40、100、250、600、1000N·m;基本误差和变差小于±1.5%;灵敏度240μA。
电动执行器主要由伺服放大器和执行机构组成,中间可以串联操作器,伺服放大器接收控制器发来的控制信号,将其同电动执行机构输出位移的反馈信号进行比较,若存在偏差,则差值经过功率放大后,驱动两相伺服电动机转动。再经减速器减速,带动输出轴改变转角。若差值为正,则伺服电动机正转,输出轴转角增大;若差值为负,则伺服电动机反转,输出轴转角减小。当差值为零时,伺服放大器输出接点信号让电动机停转,此时输出轴就稳定在与该输入信号相对应的转角位置上。这种位置式反馈结构可使输入电流与输出位移的线性关系较好。
电动执行机构不仅可以与控制器配合实现自动控制,还可通过操作器实现控制系统的自动控制和手动控制的相互切换。当操作器的切换开关置于手动操作位置时,由正反操作按钮直接控制电动机的电源,以实现执行机构输出轴的正转或反转,进行遥控手动操作。
位置发送器的工作原理位置发送器的作用是将电动执行机构输出轴的位移线性地转换成反馈信号,反馈到伺服放大器的输入端。位置发送器通常包括位移检测元件和转换电路两部分。位移检测元件用于将电动执行机构输出轴的位移转换成毫伏或电阻等信号,常用的位移检测元件有差动变压器、塑料薄膜电位器和位移传感器等;转换电路用于将位移检测元件输出信号转换成放大器所要求的信号,如0一10mA或4一20mA直流电流信号。
伺服放大器的工作原理伺服放大器主要包括放大器和两组晶闸管交流开关。放大器的作用就是将输入信号和反馈信号进行比较,得到差值信号,并根据差值的极性和大小,控制晶闸管交流开关的导通或截止。晶闸管开关用来接通伺服电动机的交流电源,分别控制伺服电动机的正反转或停止不转。
伺服放大器的作用伺服放大器作用是将输入指令信号(电压)同系统反馈信号(电压)进行比较、放大和运算后,输出一个与偏差电压信号成比例的控制电流给伺服阀力矩马达控制线圈,控制伺服阀阀芯开度大小,并起限幅保护作用。

 电子邮箱:
电子邮箱: 公司地址:上海市嘉定区马陆镇浏翔公路1908号
公司地址:上海市嘉定区马陆镇浏翔公路1908号